Teleoperate SO-101 Arm and Finetune SmolVLA
SO-101 Arm 텔레오퍼레이션으로 데이터 생성하고 파인튜닝하기
해본 지는 오래됐는데, 그동안 시간이 하나도 없어서 작성을 못헸다.
참고 자료
https://huggingface.co/docs/lerobot/so101
https://huggingface.co/blog/nvidia/gr00t-n1-5-so101-tuning
https://cory619.tistory.com/25
환경 설정
일단, 내가 가지고 있었던 SO-101 Arm은 이미 완벽하게 조립이 된 상태였다. 따라서, motor configuration & calibration으로 시작하는 teleoperation 부터 작성해보도록 하겠다.
- SO-101 Arm은 총 두 가지가 있다. Leader(내가 잡는 것), Follower(Leader의 움직임을 따라가는 것)
- 두 로봇에 대해 각각 motor configuration과 calibration을 실시해야 한다.
- 전원 어댑터 연결 시, Follower 보드는 12V 이고 Leader 보드는 5V이므로 주의해야 한다.
motor configuration
사실 이건 원래 조립할 때 하는 거지만, 나는 이미 조립된 것을 사용하여야 했어서 지금 단계에 수행했다.
-
USB 권한 부여
USB 포트의 이름을 먼저 식별한다.
lerobot-find-port출력 예시:
Finding all available ports for the MotorBus. ['/dev/ttyACM0', '/dev/ttyACM1'] Remove the usb cable from your MotorsBus and press Enter when done. [...Disconnect corresponding leader or follower arm and press Enter...] The port of this MotorsBus is /dev/ttyACM1 Reconnect the USB cable.내 경우,
dev/ttyACM0와dev/ttyACM1이였다. (이게 항상 고정된 것은 아니고 먼저 꽂는 게 0, 나중에 꽂는 게 1이다.)그런데, 그냥 하면 permission denied가 되므로,
sudo chmod 666 /dev/ttyACM0와sudo chmod 666 /dev/ttyACM1을 통해 권한을 부여해주면 된다.주의할 점은, Follower은 robot 이지만 Leader은 teleop인 것이다. 앞으로도 똑같으므로 헷갈리지 않도록 한다.
-
(이미 조립되어 있는 경우) 각 모터에서 선을 하나씩 빼서 컨트롤러 보드에 연결하여야 한다.
아까 로봇을 USB 케이블로 연결했으니, 각 모터의 이름을 식별하도록 설정해야 한다.
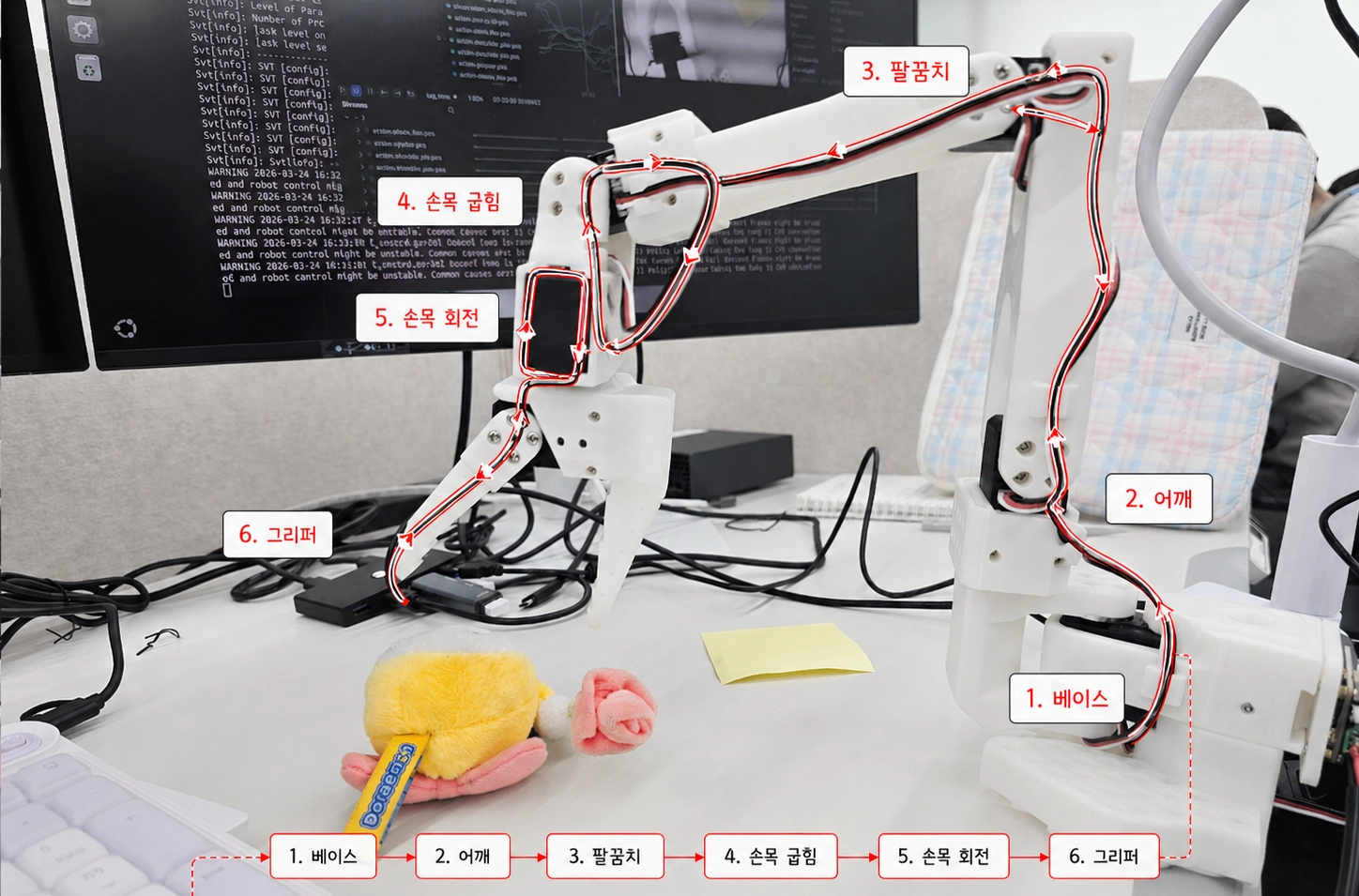
lerobot-setup-motors \ --robot.type=so101_follower \ --robot.port=/dev/ttyACM0lerobot-setup-motors \ --teleop.type=so101_leader \ --teleop.port=/dev/ttyACM1Connect the controller board to the 'gripper' motor only and press enter.맨 위(그리퍼)에서부터 가장 마지막(베이스)까지 타고 내려오면서 하나씩 제거해준 후, 컨트롤 보드에 연결해서 엔터를 치면 된다.
처음에는 헷갈리지만 직렬 연결이라고 생각하면 편하다. 이 모터는 ST3215 Serial Bus Servo 인데, 각 모터마다 2개의 커넥터가 있어 서로 직렬로 연결되는 것이다.
실제로, 이런식으로 연결된다. Leader의 경우, gripper가 Follower와는 다르게 생겼지만 어쨌든 손가락을 넣어 그리퍼를 표현할 수 있게 해놓았으므로 모터를 잘 찾으면 된다.
GPT가 그려준 사진
Joint 1 Joint 2 Joint 3 Joint 4 Joint 5 Joint 6 베이스 숄더 엘보 손목 굽힘 손목 회전 그리퍼 Board - 2 1 - 3 2 - 4 3 - 5 4 - 6 5 - X -
주의 사항 - 잘 안 되는 경우
- 전원 어댑터를 잘못 연결한 경우
- 선을 헷갈려서 모터를 잘못 입력한 경우 - 뭔가 문제가 있다면 모터 연결부터 다시 해보는 것을 추천
calibration
모터를 잘 입력했다면 이제 캘리브레이션을 하는데, Leader와 Follower의 위치값을 맞추어 같은 양만큼 움직이게 조절해주는 것이다.
-
클램프 고정
이를 위해 중요한 것은 클램프로 로봇을 반드시 고정시켜줘야 하는데, 이것이 없다면 가동 범위만큼 움직일 수 없으므로 필수적이다. 3D 프린팅으로 출력한 클램프의 성능은 매우 좋지 않으므로, 다른 클램프를 구하는 것을 추천한다.
-
캘리브레이션 명령어 입력
lerobot-calibrate \ --robot.type=so101_follower \ --robot.port=/dev/ttyACM0 \ --robot.id=my_awesome_follower_armlerobot-calibrate \ --teleop.type=so101_leader \ --teleop.port=/dev/ttyACM1 \ --teleop.id=my_awesome_leader_arm명령어를 입력하면
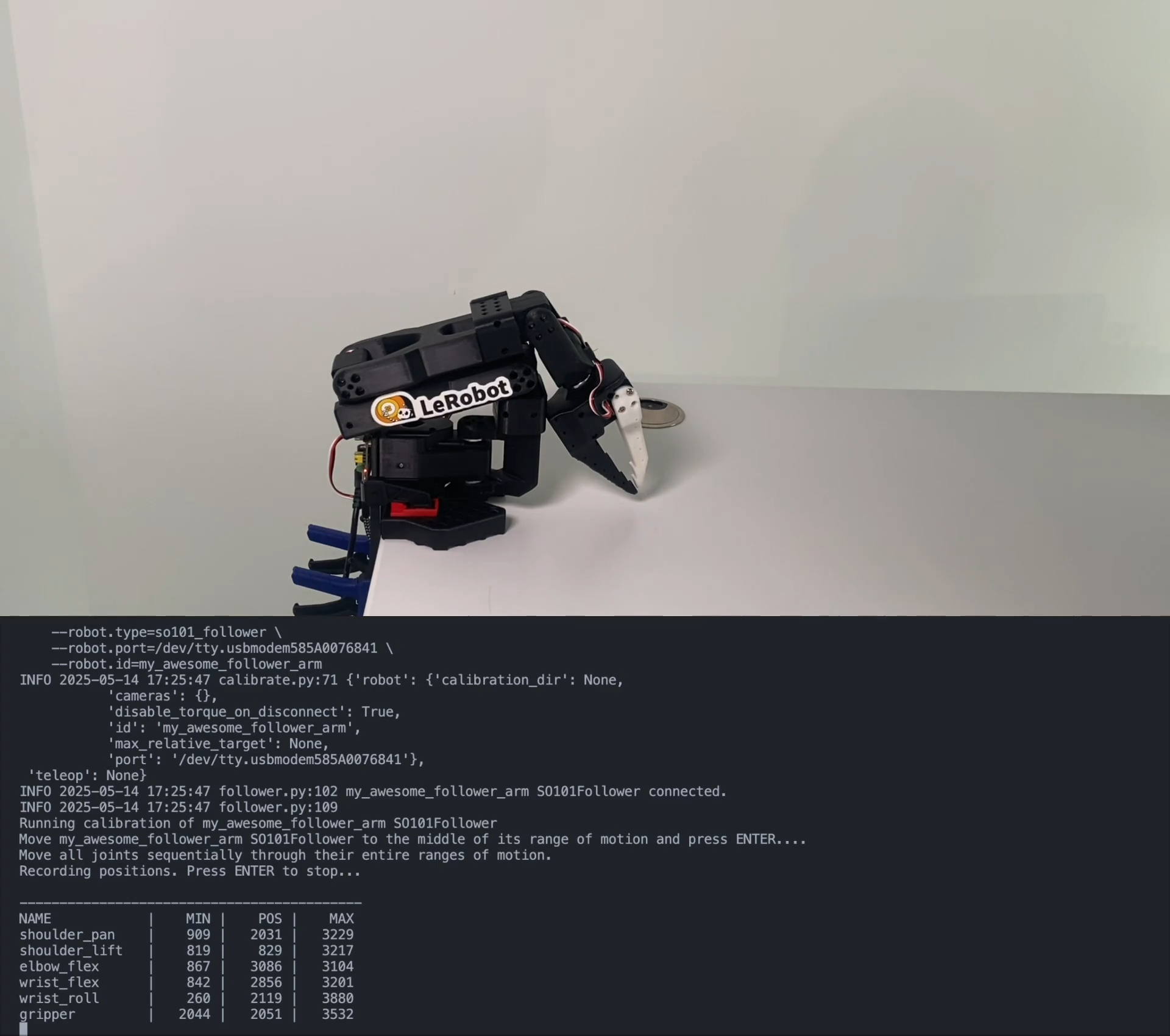
Move my_awesome_leader_arm SO101Leader to the middle of its range of motion and press ENTER....‘Middle’ position이란 아래처럼, ㄱ자로 로봇을 놓아주면 된다.

Move all joints sequentially through their entire ranges of motion. Recording positions. Press ENTER to stop...이렇게 나오는데, 이리저리 돌리고 굽혀가며 최대 / 최소 가동범위를 대충 맞춰주면 된다. 완벽히 같을 필요는 없고, 아래와 같은 정도의 값이 나오면 되는 듯하다.
-
파일 저장 확인
Calibration saved to ~/.cache/huggingface/lerobot/calibration/teleoperators/so101_leader/my_awesome_leader_arm.json
데이터 수집
teleoperation
teleoperate는 데이터 수집 없이 joint값만 확인하는 스크립트이다.
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="front:
type: opencv
index_or_path: 0
width: 640
height: 480
fps: 30" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true
지금부터는 상당히 쉬운데, lerobot에서 워낙 잘 스크립트를 만들어 놓았기 때문에 카메라만 연결해서 하면 된다. 나는 웹캠이 없었으므로 그냥 다이소에서 카메라를 샀지만, 좋은 카메라를 사는 것이 나은 것 같다.
카메라 포트만 잘 확인해서 index를 입력해주면 된다.
record
record는 이미테이션 러닝을 위해 데이터를 수집하고 저장하는 역할이다.
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--robot.cameras="front:
type: opencv
index_or_path: 0
width: 640
height: 480
fps: 30" \
--dataset.repo_id=eainx/pick_up_dorami_new \
--dataset.single_task="Pick up the doll and put it on the yellow sticky note." \
--dataset.num_episodes=50 \
--dataset.episode_time_s=30 \
--dataset.push_to_hub=true
주요 Record 옵션 설명
- 로봇 설정
-robot.type=so101_follower: 팔로워 로봇 타입-robot.port=/dev/so101_follower: 팔로워 로봇 포트-robot.id=follower: 팔로워 로봇 고유 ID
- 텔레오퍼레이션 설정
-teleop.type=so101_leader: 리더 로봇 타입-teleop.port=/dev/so101_leader: 리더 로봇 포트-teleop.id=leader: 리더 로봇 고유 ID
- 데이터셋 설정
-dataset.repo_id: HuggingFace Hub 데이터셋 이름 (username/dataset_name)-dataset.single_task: 작업에 대한 명확한 설명-dataset.fps: 데이터 수집 주파수 (기본값: 30Hz)-dataset.num_episodes=5: 수집할 에피소드 수-dataset.episode_time_s=15: 각 에피소드 녹화 시간 (기본값: 60초)-dataset.reset_time_s=3: 에피소드 간 리셋 시간 (기본값: 60초)
- 추가 옵션
-display_data=true: 실시간 데이터 시각화 (기본값: false)-dataset.video=true: 비디오 인코딩 활성화 (기본값: true)-dataset.push_to_hub=true: HuggingFace Hub에 자동 업로드 (기본값: true)
상당히 재미있는데, episode_time_s 이 지나면 녹화가 끝나고 바로 리셋이 된다. 리셋 시간도 정해져 있어서, 이 시간 동안 environment를 원상복구 시켜야 한다.
하는 도중 선이 끊기거나 하면 바로 문제가 생겨서 클램프로 로봇을 잘 고정시키고 진행해줘야 한다.
데이터셋은 huggingface eainx/pick_up_dorami에 올려두었다. 데이터셋 품질이 안 좋아서 활용도는 없다.
파인튜닝
그래도 데이터 수집을 했으니 smolVLA을 파인튜닝해보았다. (결과는 좋지 않다..)
Train 명령어는 다음과 같다. 8000 step만 진행했다.
lerobot-train \
--policy.type=smolvla \
--dataset.repo_id=eainx/pick_up_dorami \
--dataset.video_backend=pyav \
--policy.device=cuda \
--output_dir=outputs/smolvla_pick_up_dorami \
--batch_size=16 \
--steps=8000 \
--save_freq=1000 \
--policy.push_to_hub=true \
--policy.repo_id=smolvla_pick_up_dorami \
--wandb.enable=true \
--policy.device=cuda
Inference 명령어는 다음과 같다. (Follower에만 policy를 입력하므로, Leader은 필요 없다.)
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="front:
type: opencv
index_or_path: 0
width: 640
height: 480
fps: 30" \
--dataset.single_task="Pick up the doll and put it on the yellow sticky note." \
--dataset.repo_id=eainx/eval_pick_up_dorami_test \
--dataset.episode_time_s=50 \
--dataset.num_episodes=10 \
--dataset.streaming_encoding=true \
--dataset.encoder_threads=2 \
--policy.repo_id=eainx/smolvla_pick_up_dorami