Inference Gr00t N1.6 with Isaac Sim
Isaac GR00T N1.6을 LeRobot SO-101 Arm & IsaacSim으로 Inference하기
Isaac GR00T N1.6을 LeRobot SO-101 Arm & IsaacSim으로 Inference하기
파인튜닝만 하면 Inference 는 아주 간단하다. 먼저 evaluation을 실시한다.
-
eval.sh
python gr00t/eval/open_loop_eval.py \ --save-plot-path ./eval_plots \ --embodiment_tag NEW_EMBODIMENT \ --model_path <CHEKPOINT_PATH> \ --dataset_path demo_data/leisaac-pick-orange \ --modality_keys single_arm gripper
uv run bash eval.sh 로 실행하면 된다.
eval 결과는 다음과 같이 plot으로 나온다.
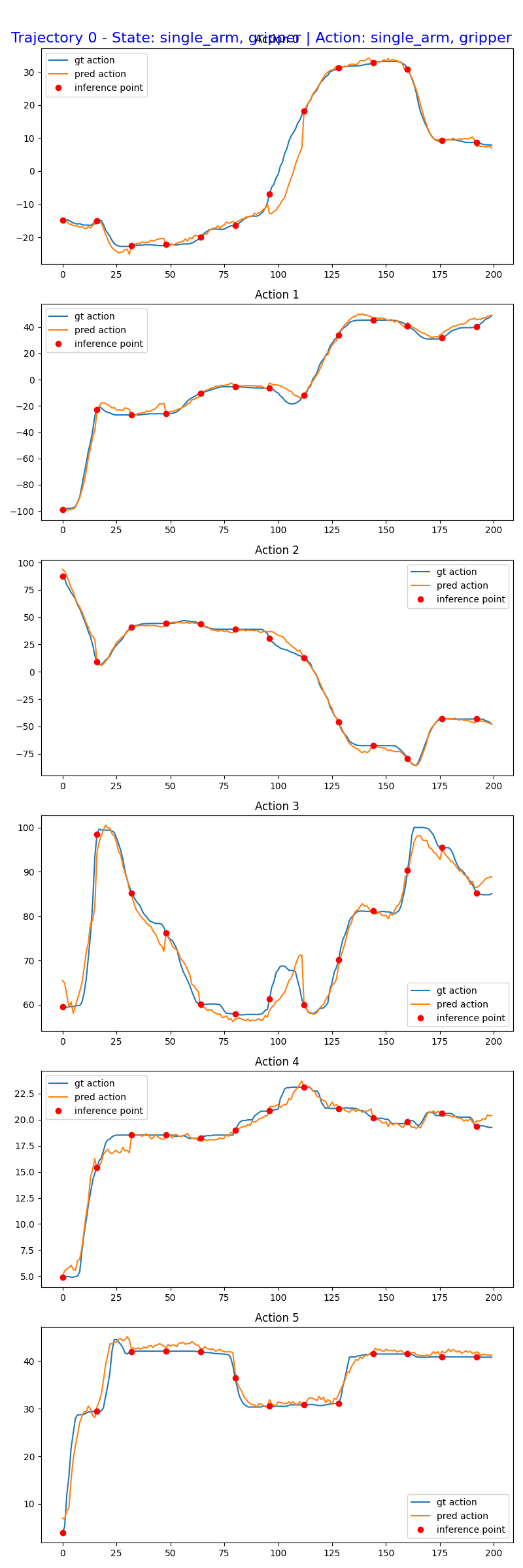
그런데, 성공률이 처참하다.
- GR00T 서버 열기
- run_server.sh
python gr00t/eval/run_gr00t_server.py \ --model_path <CHEKPOINT_PATH> \ --embodiment-tag NEW_EMBODIMENT \ --dataset_path demo_data/leisaac-pick-orange \ --modality_config_path examples/SO100/so100_config.py \ --execution_horizon 16
uv run bash run_server.sh로 실행하면 된다.
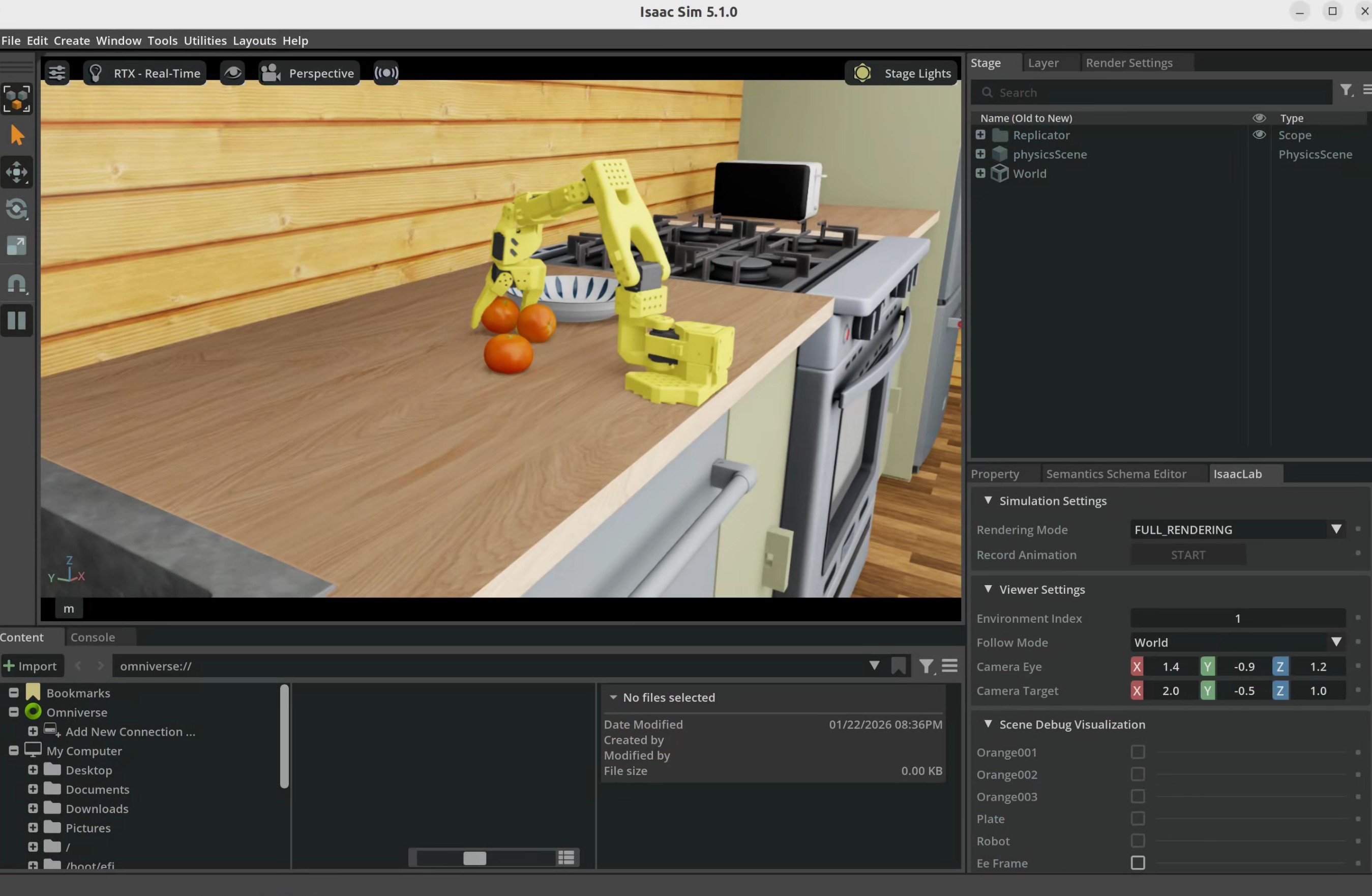
- LeIsaac 에서 Isaac Sim을 실행하여 Inference하기
- inference.sh
python scripts/evaluation/policy_inference.py \ --task=LeIsaac-SO101-PickOrange-v0 \ --eval_rounds=10 \ --policy_type=gr00tn1.6 \ --policy_host=localhost \ --policy_port=5555 \ --policy_timeout_ms=5000 \ --policy_action_horizon=16 \ --policy_language_instruction="Pick up the orange and place it on the plate" \ --device=cuda \ --enable_cameras
- Leisaac env 에서
bash inference.sh으로 실행하면 된다.
-
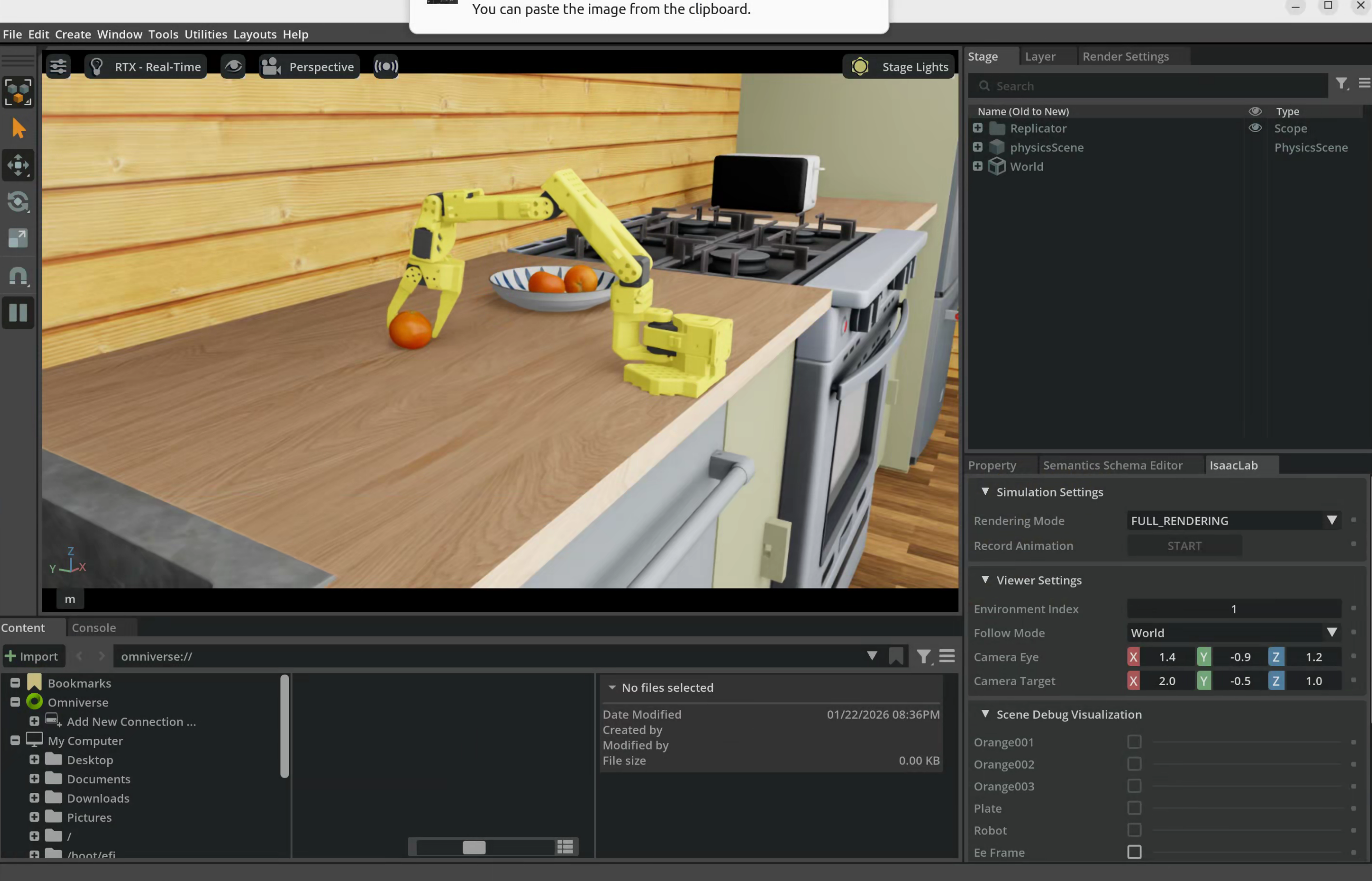
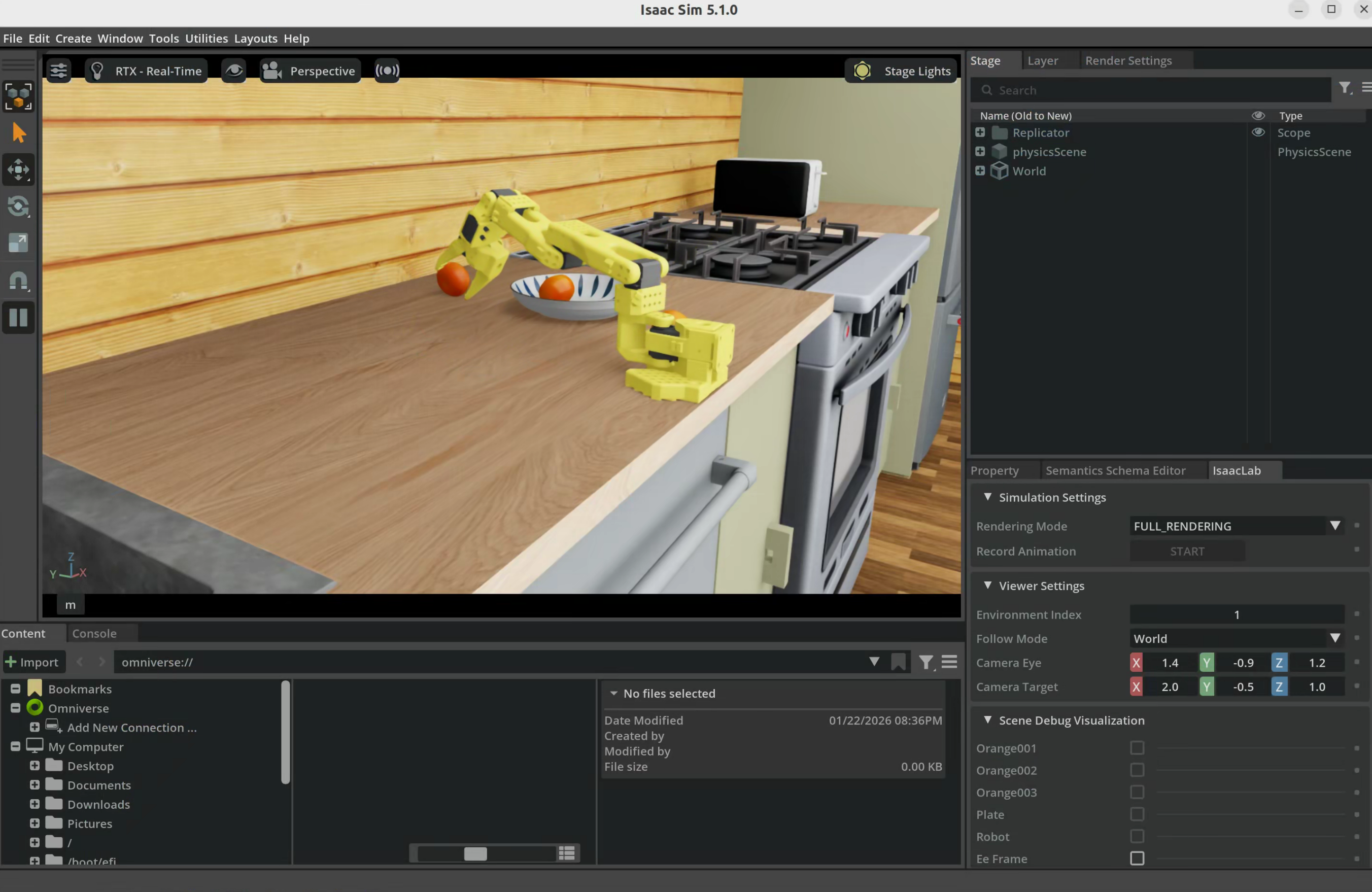
결과
상당히 발발거리면서 임무 완수를 잘 해내지 못하는 것을 볼 수 있다. 성공률 0.1인걸 봐서 뭔가 파인튜닝 과정에 문제가 있는 것 같다.
[Evaluation] Evaluating episode 1... [Evaluation] Episode 1 timed out! [Evaluation] now success rate: 0.0 [0/1] [Evaluation] Evaluating episode 2... [Evaluation] Episode 2 timed out! [Evaluation] now success rate: 0.0 [0/2] [Evaluation] Evaluating episode 3... [Evaluation] Episode 3 timed out! [Evaluation] now success rate: 0.0 [0/3] [Evaluation] Evaluating episode 4... [Evaluation] Episode 4 timed out! [Evaluation] now success rate: 0.0 [0/4] [Evaluation] Evaluating episode 5... [Evaluation] Episode 5 is successful! [Evaluation] now success rate: 0.2 [1/5] [Evaluation] Evaluating episode 6... [Evaluation] Episode 6 timed out! [Evaluation] now success rate: 0.16666666666666666 [1/6] [Evaluation] Evaluating episode 7... [Evaluation] Episode 7 timed out! [Evaluation] now success rate: 0.14285714285714285 [1/7] [Evaluation] Evaluating episode 8... [Evaluation] Episode 8 timed out! [Evaluation] now success rate: 0.125 [1/8] [Evaluation] Evaluating episode 9... [Evaluation] Episode 9 timed out! [Evaluation] now success rate: 0.1111111111111111 [1/9] [Evaluation] Evaluating episode 10... [Evaluation] Episode 10 timed out! [Evaluation] now success rate: 0.1 [1/10] [Evaluation] Final success rate: 0.100 [1/10]- 에피소드가 너무 적기 때문으로 추정된다..
- 혹은 세번째 사진처럼, 물리적 한계에 도달한 경우도 있었다. (잡은 것처럼 보이지만 실제는 너무 멀리 있는 것임/낀 경우도 있음)
다음에는 실제로 데이터셋을 구성해 학습시키고, 동일한 방식으로 실행 해보려 한다.
SO-100 ARM이 실제로 온다면.. 그땐 텔레오퍼레이션도 해볼 수 있겠지….