Robot Learning 리뷰
Robot Learning: A Tutorial
2. Classical Robotics
Robot Types and Methods
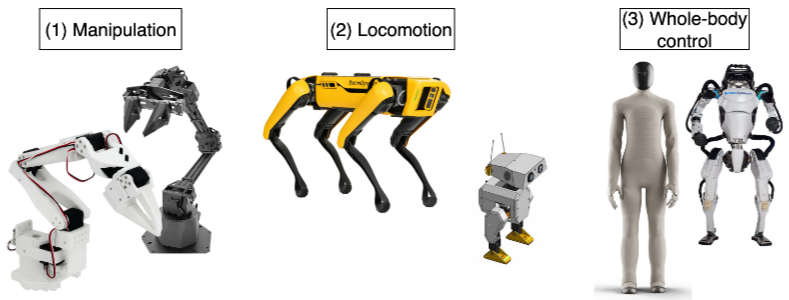
- 로봇의 종류들 - Manipulation, Locomotion, whole-body control(Humanoid)
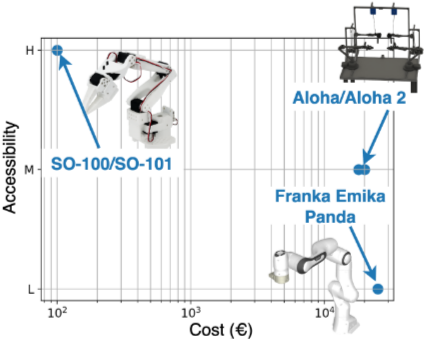
- SO-100은 저렴하지만 Aloha/Franka Emika Panda는 비싸다
- 시뮬레이터가 괜히 있는게 아니구나
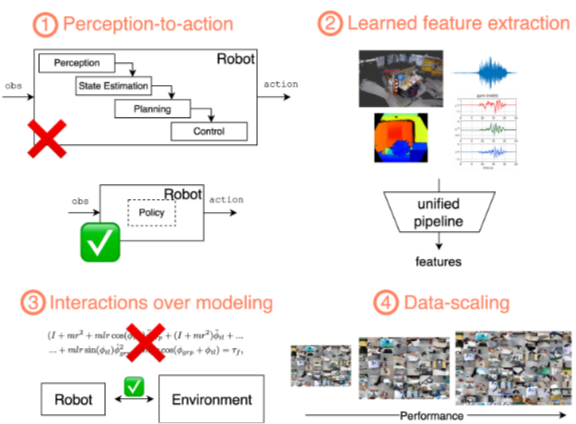
- Explicit/Implicit Models
- Explicit: Dynamic based methods (동역학 - FK/IK 기반)
- Implicit: Learning-based methods (요즘 트렌드)
Forward/Inverse Kinematics
- Configuration -> Pose : Forward Kinematics (FK)
- Pose -> Configuration : Inverse Kinematics (IK)
- 원하는 End-effector의 포즈를 위해 joint configuration을 추정하는 것
- Inverse Kinematics
- Analytical solution: 환경에 장애물이 있을 때 구하기 어려움
-
따라서 iterative optimization을 통해 구함
\[\min_{q \in Q} \|p(q) - p^*\|_2^2.\] - 그러나 이것 역시 시간에 따른 trajectory에 대해 설명할 수는 없음 (그저 pose에 대한 config만)
- Differential IK
- joint 의 절대적인 위치 대신, joint 속도(\dot{q}(t)) 를 제어하여 End-effector의 목표 속도를 추적
- pose ‘p’는 configuration ‘q’에 대한 함수, J(q)는 이 함수에 대한 변화율임. q의 변화가 p의 변화로 어떻게 매핑되는지 보여주는 선형 변환.
- 즉 p의 변화율 = J(q) q의 변화율. 즉 문제의 초점을 configuration에서 velocity로 옮겨서 해결
- 그러나 이것 역시 Well-controlled, static env에서만 효과적이며 오류 발생 가능성이 높다
- Adding Feedback Loops
- IK의 한계점을 위해 도입
- 목표 pose 와 현재 pose 사이의 오차를 계산하고 이 오차를 기반으로 로봇의 configuration을 수정
- 그러나 이것 역시 gain tuning이 어렵고, hybrid dynamics (mode switches) 및 discontinuities in Jacobian을 해결하기 어려움
Limitations of Dynamics-based Robotics

- Classical Methods
- Lack of Generalization
- Integration and Scalability Issues
- Multimodal data 처리가 어려움
- Difficulty in Accurate Physical Modeling
- Rigid body assumption 등이 실제 적용에 어려움을 줌
- Overlooking Data Trends
- 현재 급증하는 오픈소스 데이터셋의 증가 추세를 활용하지 못함
→ 결론: learning-based approach가 좋다. (마치 SLAM 같군….)

- Learning method에는 RL(Reinforcement Learning)과 BC(Behavior cloning = imitation)이 있음
- RL→BC로 트렌드가 바뀜 (최근 VLA논문만 봐도 그런듯)
- ‘Generalist’ Policy는 language conditioned이고 instruction을 통해 motion을 만듦
- 일단 여기 나와있는 예시는 Lerobot에서 지원하는것만 나열한 것임.
3. Robot (Reinforcement) Learning
-
What is RL(강화학습)?
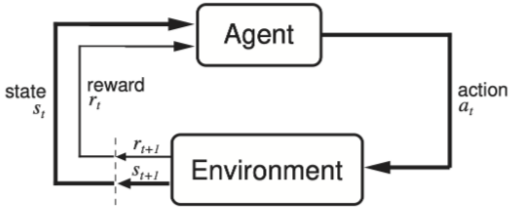
- ML의 한 분야로 “에이전트(Agent)”가 “환경(Environment)”와 지속적으로 상호작용하여 최적의 “정책(Policies)”을 학습하는 것을 목표로 함
- Agent는 Explicit한 problem modeling 대신 상호작용 데이터를 통해 Trial and error로 스스로 개선함
Reinforcement Learning is a discrete time stochastic control process,
where an agent interacts with its environment/state.
강화학습은 AI Agent가 특정 state/situation 내에 최대의 보상 Q를 가져다주는 action을 학습하는 과정이다.
- Markov Decision Process (MDP)
- Discrete time을 가정함
- M = ⟨S, A, D, r, γ, ρ, T ⟩
- S=state space, A=action space, D=environment dynamics
- r: S × A × S → R = reward function
- γ ∈ [0, 1) discount factor(immediate vs. long-term reward)
- ρ=distribution over S for initial (s_0 ~ρ)
- T=length
-
Markov assumption을 통해 joint probability conditional probability의 곱으로 분해할 수 있음
\[\mathbb{P}(\tau) = \mathbb{P}(s_0) \prod_{t=0}^{T-1} \mathbb{P}(s_{t+1}|s_t, a_t) \mathbb{P}(a_t|s_t).\] -
\[G(\tau) = \sum_{t=0}^{T-1} \gamma^t r_t.\\ J(\pi_\theta) = \mathbb{E}_{\tau \sim \mathbb{P}_{\theta;D}}[G(\tau)],\]policy P(at st)는 πθ (at st)로 표현되며 return(=cumulative discounted reward) maximize하는 방식으로 학습됨 - 그래서 optimal policy π∗ = arg maxθ J(πθ ) 이다.
- 또한 이건 state과 action간의 쌍이 얼마나 ‘바람직한지’ 판단하는데 사용될 수 있다.
- 특정 policy인 π 에서, V=state-value func, Q=state-action value func
- ML의 한 분야로 “에이전트(Agent)”가 “환경(Environment)”와 지속적으로 상호작용하여 최적의 “정책(Policies)”을 학습하는 것을 목표로 함
- Real-world RL for Robotics
- 하지만 실제로 Real world에서 적용하기에는 simulation과 real world의 gap이 커서 어렵다.
- 단점
- Safety and Erratic(예측 불가능) Actions
- Learning Efficiency
- RL 알고리즘은 일반적으로 많은 수의 상호작용 데이터를 필요로 하며, 실제 하드웨어에서 이 데이터를 생성하는 것은 시간이 많이 소요됨
- 이를 해결하기 위해 simulation에서 학습하지만 실제로는 reality gap을 극복하기 어려움
- Reality Gap
- Domain randomization
- 하지만 어떤 파라미터를 랜덤화할지 정하는것, 그리고 dynamic distribution을 정하는 것 또한 어려움
- Domain randomization
- Reward Function Design
- Sample-efficient RL
- Soft Actor-Critic(SAC)
- Off-policy
- 데이터를 수집하는 정책(behavior policy)와 업데이트 대상(target policy)이 다른 기
- 샘플 효율성이 뛰어남
- replay buffer을 이용해 과거에 수집된 데이터를 재사용함으로써 학습 효율을 높임
- Off-policy
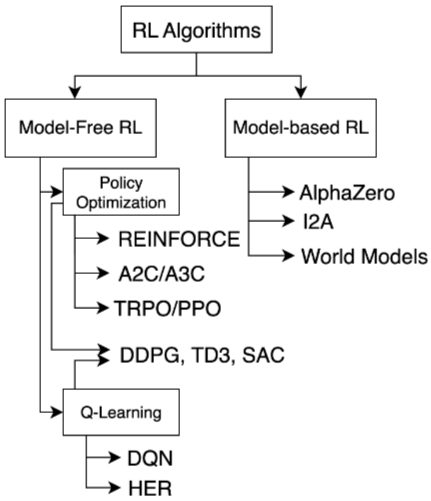
- 강화 학습의 핵심 목표
- 에이전트가 현재 상태에서 어떤 행동을 취했을 때 미래에 얻을 수 있는 총 보상(Q-function)을 최대화하는 최적의 정책을 찾는 것
- Bellman Equation
- Q-learning
- 그러나 이것은 small-scale의 discrete한 문제에서만 효과적이기에 DQN과 같은 방식이 나오기도 함 (TD-error→ temporal difference을 최소화)
- 하지만 DQN도 continuous action space에는 문제가 있음
- 이를 위해 DPG 와 DDPG같은 방법이 제시 (deterministic)
- SAC
- DDPG에서 파생되었지만 Max-Entropy RL 프레임워크를 도입
- 무작위로 행동하도록 유도 (entropy H)
- DDPG에서 파생되었지만 Max-Entropy RL 프레임워크를 도입
- Soft Actor-Critic(SAC)
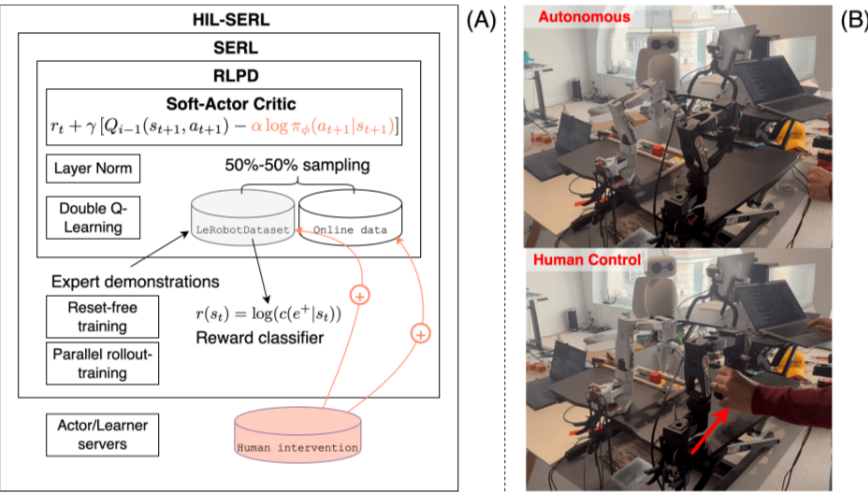
- Sample-efficient + Data-driven RL
- RLPD (RL with Prior Data)
- 기존 Offline-to-online과 달리 pre-train을 하지 않고 offline data를 사용하여 online 학습을 처음부터 개선함
- SAC루틴에 online+offline replay buffer을 같은 비율로 샘플링하여 학습
- RLPD (RL with Prior Data)
- Sample-efficient + Data-driven + Real-world RL
- 복잡한 보상 함수(reward function) 정의의 어려움 + 비정형 관측(unstructured image observation)에서 보상 함수 사용의 어려움을 해결하기 위함
- SERL: reward classifier
- 티셔츠 접기 같은 정확한 reward formulation이 어려운 task에 대해 success/failure 데모로부터 learn
- forward/backward controller을 나눔
- forward: completion을 위함 (initial→completion)
- backward: initial state로 되돌리기 위함 (terminal→initial)
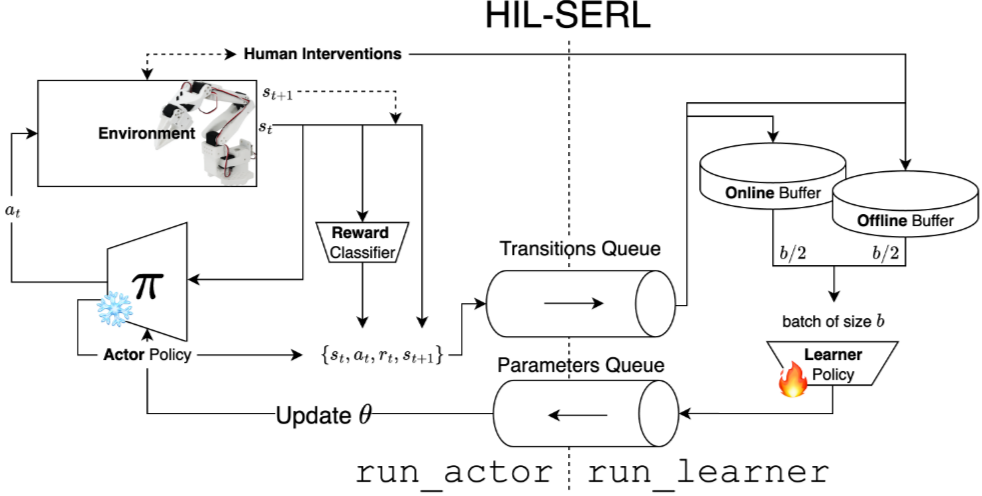
- HIL-SERL (Human In the Loop SERL)
- Offiline-to-Online RL
- Targeted Human corrections
- Prior data로 reward classifier을 학습하고 expert trajectory를 활용
- But RL still has limitations…
- Real-world training experience is expensive to gather
- Reward design is a fundamental source of brittleness in real-world RL pipeline (and also task-specific)
4. Robot (Imitation) Learning
- Behavior Cloning
- Imitation Learning
- RL과 달리 context D는 offline dataset (human trajectory) 이고, environment dynamics가 아님
- 또한 trajectory T또한 보상 정보(reward information)을 완전히 생략함
→ 보상을 직접적으로 최적화하는 대신 단순히 expert demonstration을 모방하는 것을 목표로 함.
- BC의 목표
- expert demonstration을 관찰하여 로봇이 특정 작업을 수행하는 방법을 배우는 지도 학습(Supervised Learning, SL)의 일종
- non-i.i.d. data의 문제점
- 일반적인 지도 학습은 훈련 데이터가 ‘독립적이고 동일하게 분포되어 있다(Independent and Identically Distributed, i.i.d.)’고 가정
- 하지만 demonstration data D는 경로(trajectory)의 형태로 순차적으로 수집되기 때문에 i.i.d. 가정을 위반
- 이를 위해 샘플 셔플링과 interleaving 방식을 사용
- 그럼에도 장점이 많다.
- 오프라인 학습을 통해 dangerous한 action을 배우는 것을 방지
- reward design이 빌표하지 않음
- expert trajectory가 terminal condition을 포함하므로 success detection/reset이 implicit하게 데이터셋에 있음
- 확장성이 좋음
- 그러나 아직 성능의 한계(not better than demo) 존재 → 이건 아닐수도?
- point-estimate policy
- 특정 관측(f: O→A)에 대해 하나의 특정 행동을 예측하는 정책
- compounding errors 와 poor fit to multimodal distributions 문제가 있음
-
Generative Models
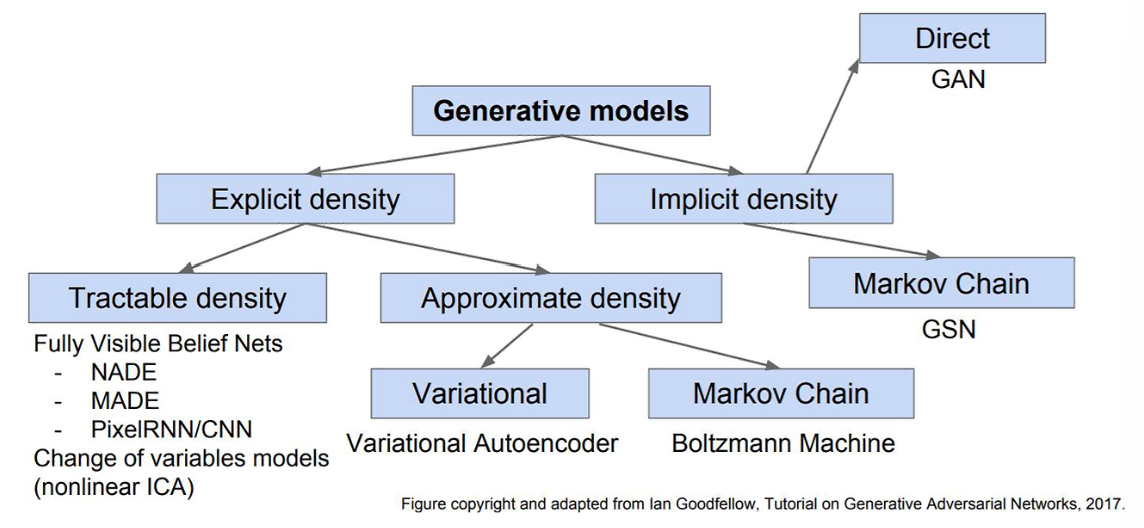

- VAE
- Diffusion models
- Flow Matching
- 모두 Approximate density 유형임.
-
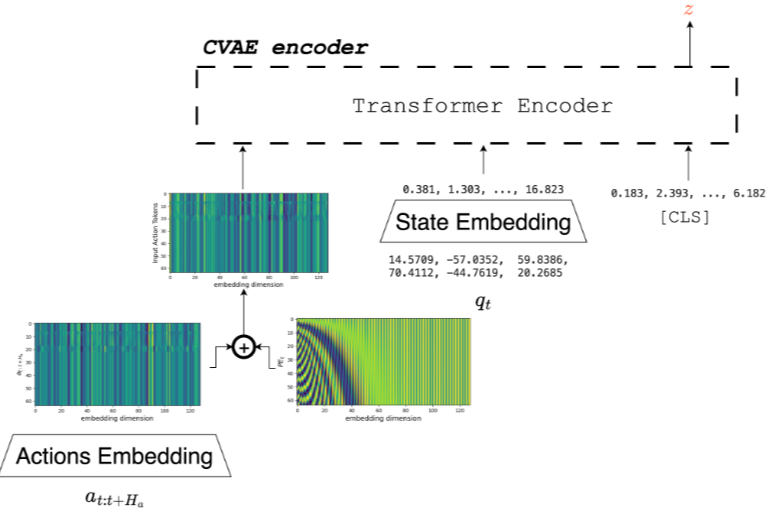
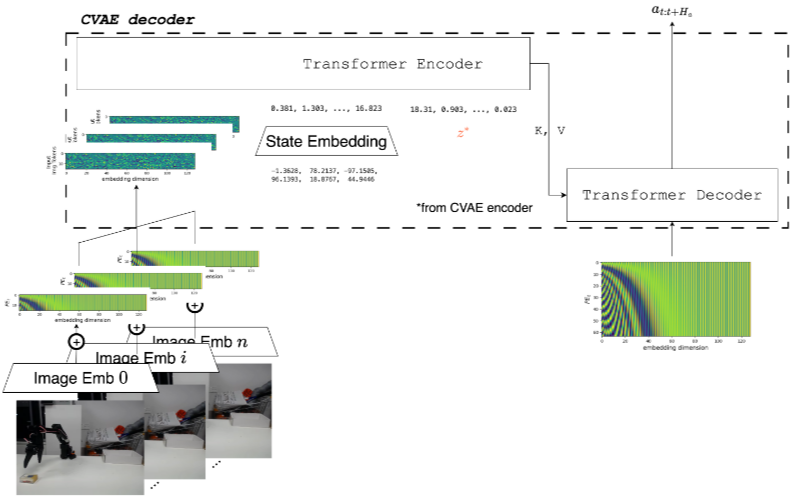
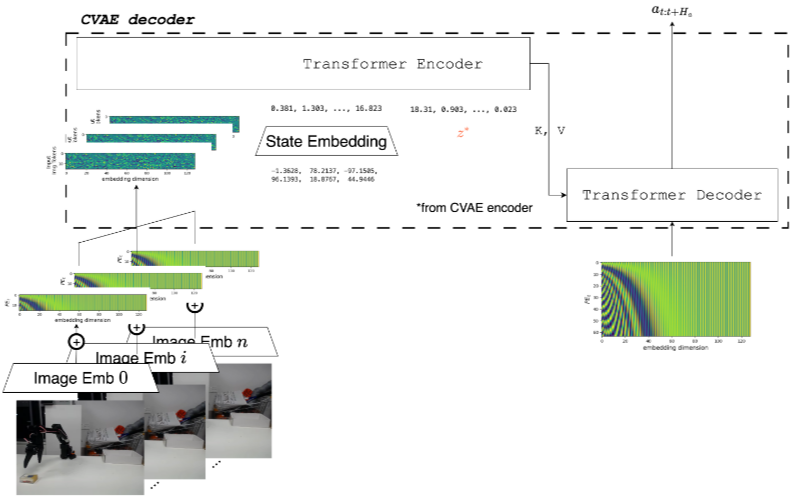
Action Chunking with Transformers (ACT)
- online, sequential prediction의 누적 오차 문제 (compounding errors)문제 해결을 위해 Action chunk를 한번에 예측하게 함 (Transformer)
- conditional VAE를 이용해 policy distribution (조건부 확률분포) 을 직접 모델링함.
- Latent sampling을 할 수 있게 되어 policy를 generate할 때 유리
- GM vs SL
- 학습할 때 일반 demonstration data에서는 괜찮았으나 human demonstration에서 SL의 심각한 저하가 일어남.
- Action Chunking으로 1% vs 44%의 성능개선
- Latent space z
- CVAE는 z를 학습하고 encoding→decoding 하는데,
-
Training 시에는 approximate posterior distribution q(z o,a) 에서 sample 되고 inference시에는 z=0으로 놓고 deterministic하게 함 (prior distribution = N(0,I))
- online, sequential prediction의 누적 오차 문제 (compounding errors)문제 해결을 위해 Action chunk를 한번에 예측하게 함 (Transformer)
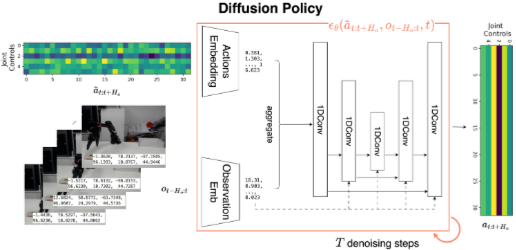
- Diffusion Policy
- ACT와 마찬가지로 observation-conditioned target distribution을 사용하고, action chunk를 예측하게 함
- 이는 주변분포 p(o)를 계산하는 것이 불가능하기도 하고, test time에 action과 observation을 같이 생성하는 것이 computational burden이므로 conditional distribution을 예측하는 것임
- observation에 대해서 Unet 의 매 layer에서 conditioned 됨.
- Train시 noise를 추가하고 이걸 예측하는 방식으로 학습됨. (forward diffusion)
- Inference시는 이 noise predictor (unet)을 사용해 매 timestep의 노이즈를 예측하고 denoise를 함. (reverse diffusion)
- Detail
- high frame-rate visual observations로 state based policy보다 좋은 성능을 보임
- DDIM 적용 (inference 속도를 위해 → 그러나 deterministic함.)
- 또한 Transformer based가 더 성능이 좋지만 hyperparams에 예민하기 때문에 convolution을
- ACT와 마찬가지로 observation-conditioned target distribution을 사용하고, action chunk를 예측하게 함
- Optimized Inference
- 액션 계획(action planning)과 액션 실행(action execution)을 분리(decoupling)
- Asynchronous inference (비동기적)
- RobotClient: 로봇 하드웨어에 연결되어 observation을 캡처하고, PolicyServer로부터 받은 action을 실행 PolicyServer: 원격에서 작동하며, RobotClient로부터 받은 관측값을 바탕으로 다음 action chunk을 예측 - 새로운 observation :
- RobotClient는 큐에 남아있는 액션의 수가 특정 임계값 미만으로 떨어질 때 observation을 캡쳐함 이 조건이 충족되면, 새로운 observation은 PolicyServer로 전송되어 다음 action chunk을 요청
- 중복 방지를 위해 observation을 필터링함 - +)
- 지금 보니까 Graspvla가 client 와 server로 이루어진 이유가 있었구나..
- 실제로는 network latency문제도 크다고 함
5. Generalist Robot Policies
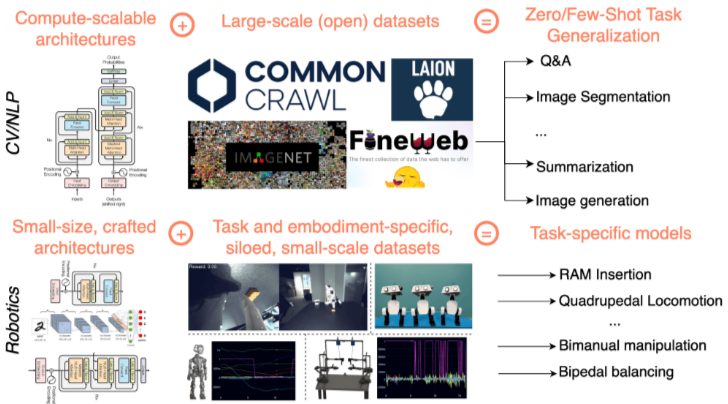
- ‘Generalist’ Policy of NLP and CV
- initial large scale pre-training stage
- task-specific adjustment phase
- But why Robotics are developed as ‘Specialist’?
- Data heterogeneity
- Robotic data는 이미지나 텍스트와 달리 intrinsically embodied고 결국 task-specific하다
- manipulation ≠ lcoomotion
- 또한 이러한 데이터는 특정 platform이나 environment/task에 따라 매우 다름
- 이러한 데이터를 aggregate하는 것은 negative transfer을 일으킬 수 있음
-
Development of Generalist models
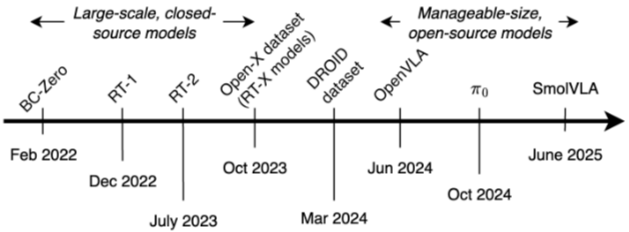
-
Models
- RT-1
- transformer 구조 사용
- 130k 데이터셋을 17개월 넘게 학습시킴
- discretized actions 를 classification loss (256 bins) 사용하여 학습
- RT-2
- 더 나은 architecture
- dataset scaling up을 통해 강화됨
- VLM의 internet-scale sematnic knowledge를 사용하여 학습하지 않은 task에서 추론이 가능함 (ex- 망치 task에서 망치 대신 돌을 사용할 수 있다고 답함)
- OpenVLA
- pretrained vision encoder을 이용해 llama의 embedding space에 visual token을 project함 (LLM+vision encoder)
- LLM이 discrete action token을 예측하게
- RT-1
-
Datasets
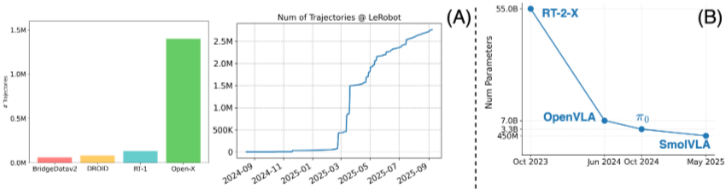
- Open X-Embodiment project
- 60개의 존재하는 robotic dataset을 모아서 1.4 M scale의 데이터셋을 만듦
- DROID
- 75k+의 human robot interaction dataset을 모음
- Open X-Embodiment project
-
- VLAs
- unified transformer model (Pi-0, SmolVLA)
- VLM backbone
- internet-scale의 pretrained backbone
- action experts를 도입해 continuous한 action distribution을 모델링함
- discrete token X
- generative model
- action chunking
- error compounding을 줄임
- VLM for VLAs
-
Pi-0
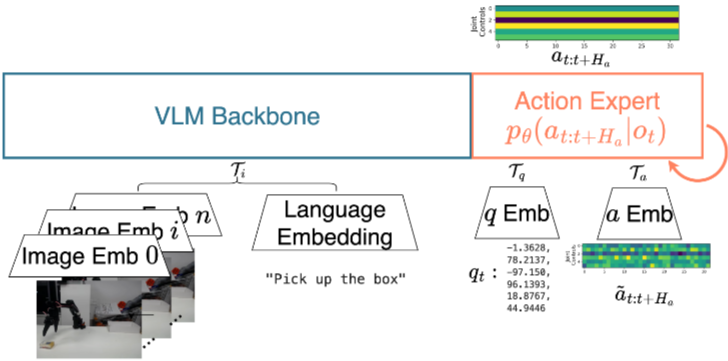
- MoE architecture
- Unified transformer
- Blockwise causal attention mask
- image/language, q, a 3가지가 각각은 self-attention이지만 서로 attend하지는 못함
- 이는 pretrained된 V-L language가 robotics를 통해 안 좋아지는 걸 막기 위함임
- Blockwise causal attention mask
- pre-trained VLM backbone(Paligemma 2.6B)
- action expert via flow matching (300M parameter을 추가)
- proprioceptive state (observation, q) 과 action chunk(a)는 action expert를 통해 처음부터 학습
- self attention으로 q와 a는 서로 attend하지만, 각각 다른 W을 가짐
- flow matching loss를 처음에는 VLM param도 update했지만, 후에 이것이 오히려 VLM의 knowledge에 harmful하다는 것을 알게 됨 (Driess, 2025)
- 그니까 사전 학습된 VLM은 frozen시키는게 맞다는 뜻 인듯
- Flow matching은 continuous time deterministic diffusion process
- 일반적인 uniform distribution 이 아닌 beta 분포에서 sample되는데, 이는 early timestep에 더 집중하기 위함임
- 하지만 pretraining dataset이 공개되어 있지 않음
- cross-embodiment → zero padding을 통해 해결함
-
SmolVLA
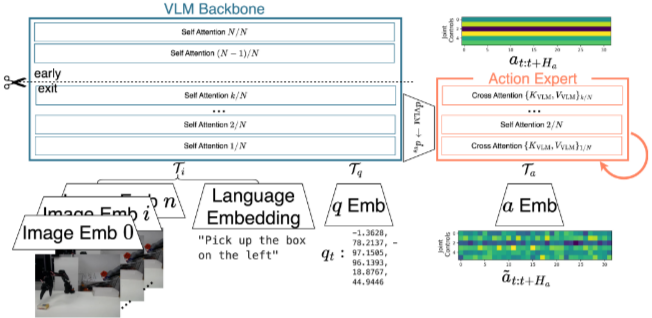
- SmolVLM-2
- SigLIP vision encoder
- ~100M의 작은 action expert를 추가하여 총 450M의 parameter
- VLM의 token으로 proprioperceptive state q를 받음
- action expert
- blockwise mask 대신 causal mask를 택함
- cross attention과 self attention을 interleave함
- cross attention: action-Query, V,L,q를 shared embedding space로 해서 K와 V를 얻음 (K_vlm, V_vlm)
- 논문을 한번 읽어봐야겠다..!
- 450개 dataset에서만 pretrain→ dataset scale 문제가 아님?
- reannotate dataset → 양보단 질이 중요?
- rivaling π0 while being close to 40% faster and consuming 6x less memory
- SmolVLM-2